
Simplified Abstract
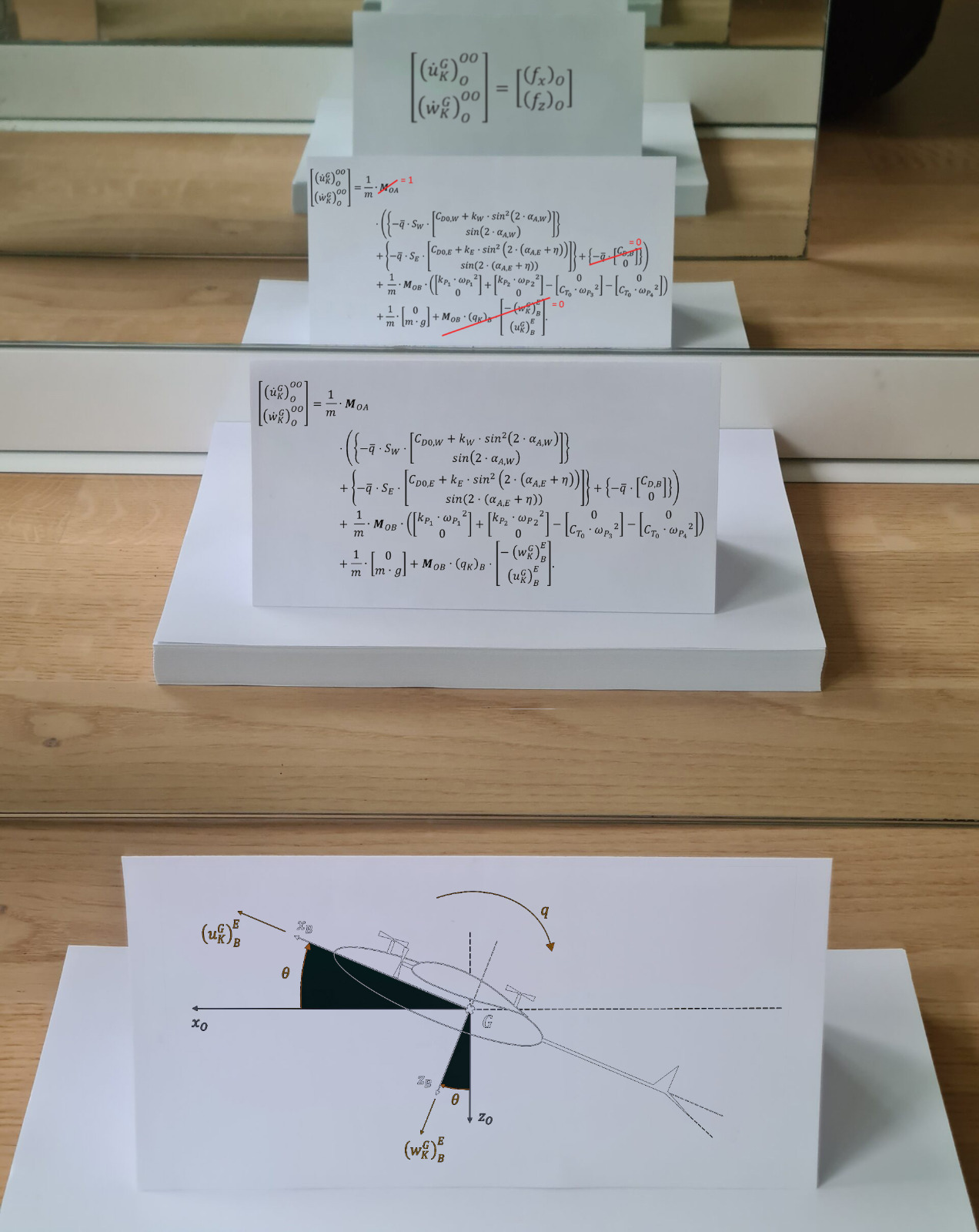
The task of the thesis was to investigate the influence of nonlinear coupling effects on the longitudinal flight dynamics of a Vertical Take-Off and Landing Vehicle (VTOL), a special type of drone. During flight tests, my supervisors project group discovered undesired flight behavior of their real existing VTOL, which did not appear in the full scale, multi degree of freedom simulation model. To examine the correlations between the different actuators, my task was to create a simplified model of the longitudinal dynamics of the VTOL, control it with the applied control algorithm and try to find out the connections that cause the undesired flight behavior. The big aim was to implement counter measures to improve the flight behavior and supply it to the project groups model.
Name: Nico Michel
Field of study: Mechanical Engineering/ Aerospace
Supervisor: Prof. Holzapfel
Chair: Institute of Flight System Dynamics
Name: Dominik Wernberger
Name: Dominik Wernberger
**This website is a beta version**
| Cookie | Duration | Description |
|---|---|---|
| cookielawinfo-checkbox-analytics | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics". |
| cookielawinfo-checkbox-functional | 11 months | The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional". |
| cookielawinfo-checkbox-necessary | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary". |
| cookielawinfo-checkbox-others | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other. |
| cookielawinfo-checkbox-performance | 11 months | This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance". |
| viewed_cookie_policy | 11 months | The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data. |
